飞特舵机使用补充资料
1. 上位机调试软件 Feetech Debug
最新的Windows版本下载
https://www.feetechrc.com/software.html
对于 Ubuntu 的用户,可以使用第三方基于Qt开发的开源软件
wget https://github.com/Kotakku/FT_SCServo_Debug_Qt/releases/download/v1.1.0/ft-scservo-debug-qt_1.1.0_amd64.deb
sudo apt install ./ft-scservo-debug-qt_1.1.0_amd64.debMacOS 用户,可以克隆代码自行编译,开源项目地址:https://github.com/Kotakku/FT_SCServo_Debug_Qt
2. Feetech Debug 使用视频解说
飞特官方出品【飞特串口舵机电子功能讲解】
暂时无法在飞书文档外展示此内容
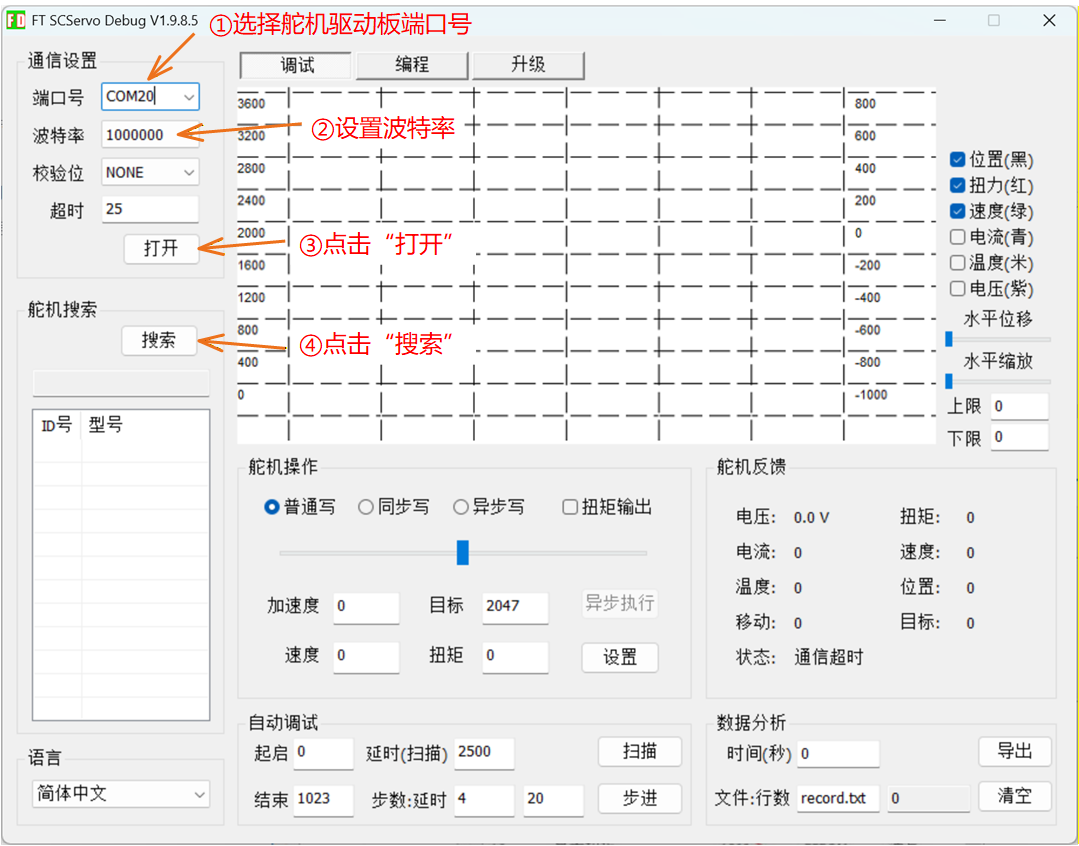
2.1 基本使用流程
注意:STS系列的波特率默认为 1000000,记得修改为 1000000。
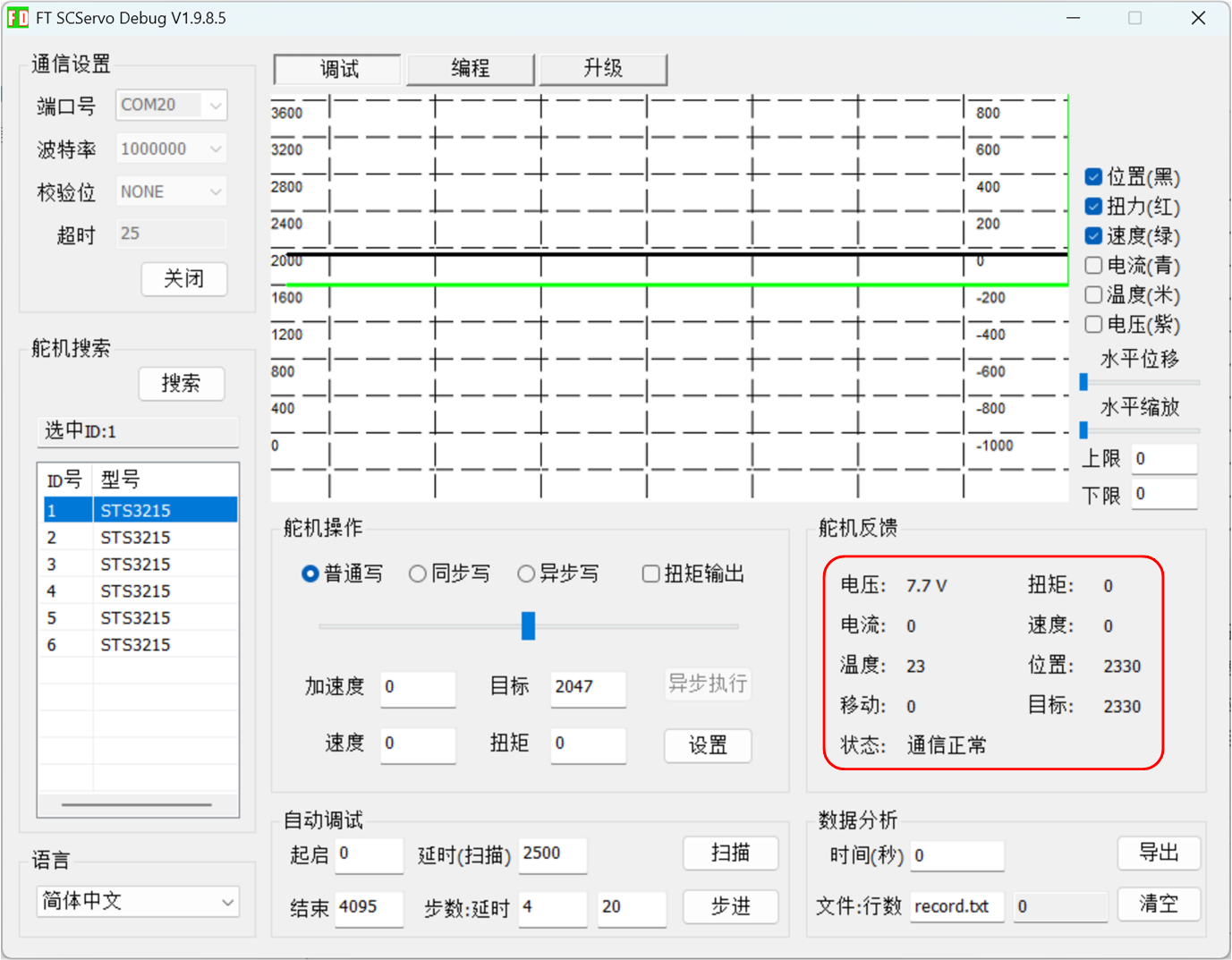
搜索完成之后,会列出所有连在串口总线上的舵机。选中其中一个,在右侧 “舵机反馈” 区域可以看到选中舵机的状态反馈。
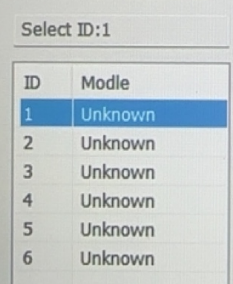
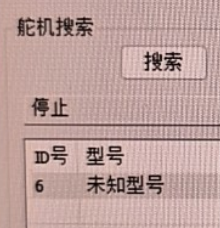
如果搜索之后型号显示“Unknown” 或者“未知型号”,请将 FD.exe 拷贝到 ft_setup_bat 文件夹中,再打开 FD.exe,进入程序之后按 Ctrl+M 下载软件参数即可。
 |
 |
|---|---|
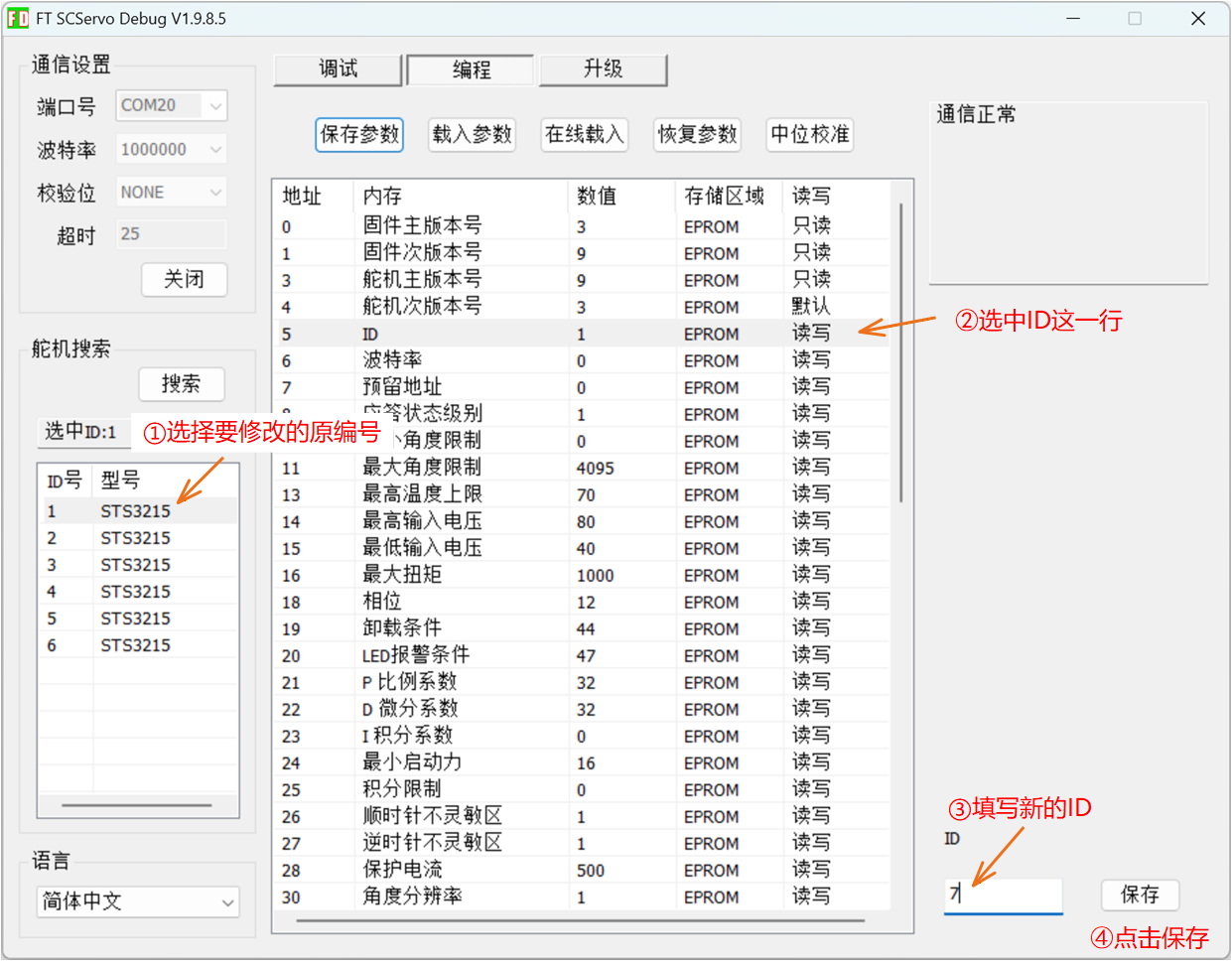
3. Windows 上修改舵机编号
使用 Feetech-Debug (fd.exe) 设置波特率为1000000,打开连接的串口,搜索到连接的舵机。
左侧边栏,选中需要修改ID的舵机,点击**“编程”选项卡,选中第5行ID这一栏**,右下角修改新的ID号,点击保存,弹出“参数保存成功”即修改成功。
4. 舵机固件升级
飞特在2025年4月份做过一次舵机固件升级:3.9 --> 3.10
不同固件版本的舵机混用时,可能会出现错误:
ConnectionError: Read failed due to communication error on port COM7 for group_key Present_Position_shoulder_pan_shoulder_lift_elbow_flex_wrist_flex_wrist_roll_gripper: [TxRxResult] There is no status packet!
升级步骤:
a. 选择端口号,配置波特率为1000000,打开
b. 点击搜索,搜索到6个或9个以后,点停止(一定要先点停止!)
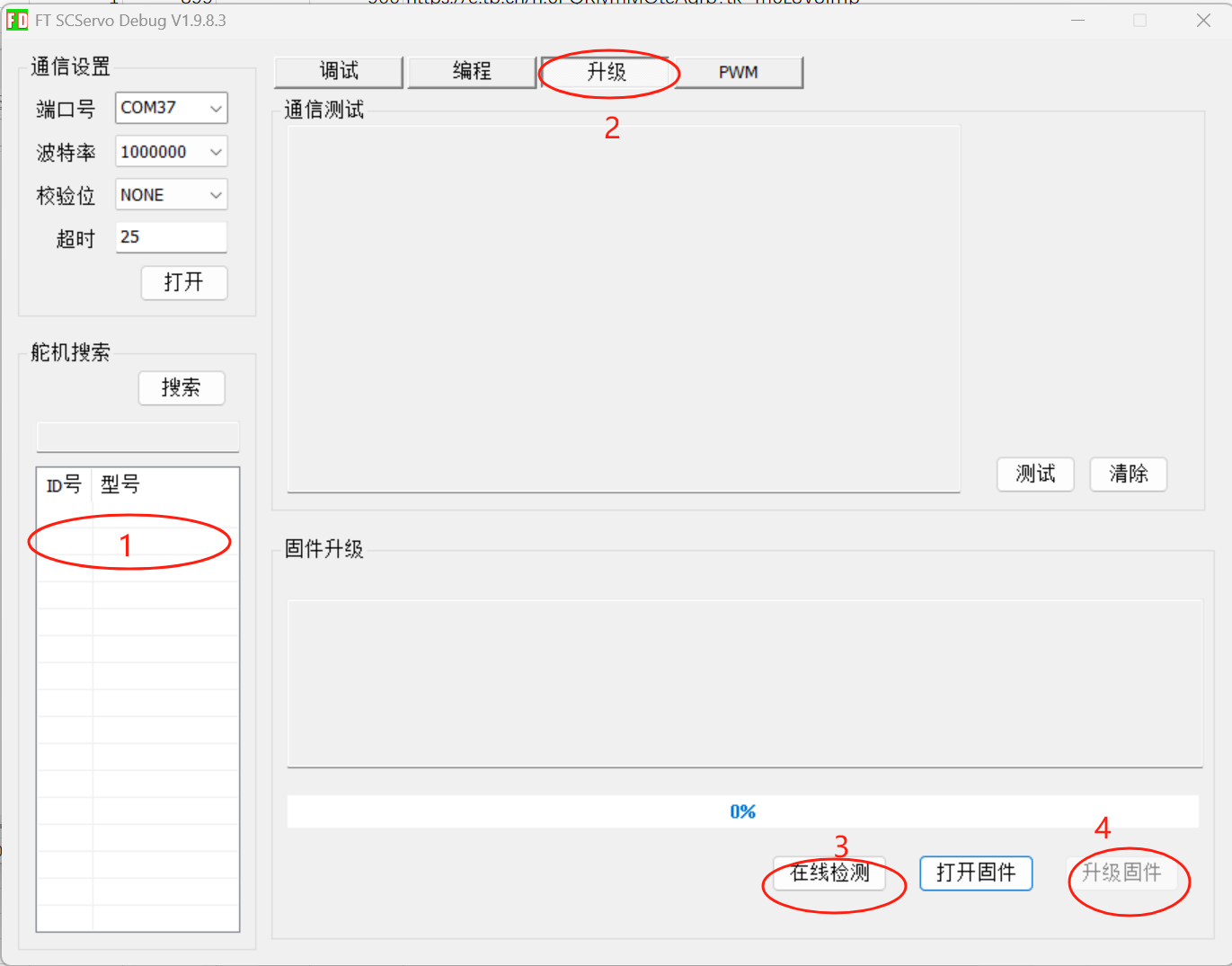
每个舵机的升级操作:
- 左侧选中一个搜索到的舵机
- 切换到“升级”选项卡
- 点击“在线检测”
- 点击“升级固件”。升级100%完成前,不要有任何其他操作,切记!!!!
4.1 变砖之后,如何重刷固件
拿一个可以正常连接的舵机
- 使用FeetechDebug.exe (FD.exe) 在线检测出固件
- 拔掉正常连接的舵机
- 插入固件升级失败的舵机,采用断电升级固件法,上电1秒内点升级,每升一次扫描一次,直到成功出现ID号导入参数即可