已有训练模型部署
1. 安装
把 机械臂夹稳
连接USB线,连接相机到电脑
接上电源
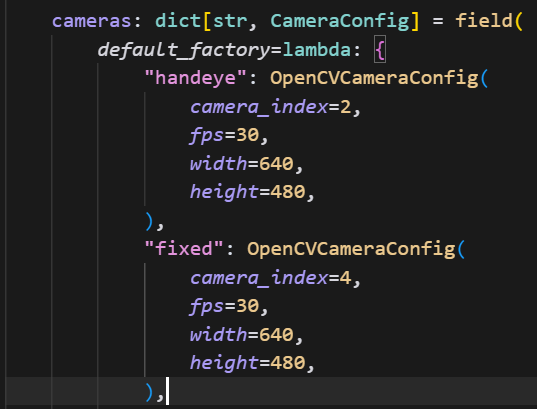
2. 确认相机 ID
两个相机都连上电脑之后
运行 benchmark/videoio/capture_camera_feed.py 检查两个相机的ID。
如果笔记本已经有相机ID,那可能是 2,4。
修改 lerobot\common\robot_devices\robots\configs.py 文件中 So101RobotConfig 这个类的相机配置。
3. 下载部署模型
下载模型到某个文件夹,比如是 act_so101_block2box
拷贝到这个文件夹。
运行推理
Bash
python lerobot/scripts/control_robot.py \
--robot.type=so101 \
--control.type=record \
--control.fps=30 \
--control.single_task="Grasp a block and put it in the box." \
--control.repo_id=${HF_USER}/eval_act_so101_block2box \
--control.tags='["tutorial"]' \
--control.warmup_time_s=5 \
--control.episode_time_s=20 \
--control.reset_time_s=5 \
--control.num_episodes=10 \
--control.push_to_hub=false \
--control.policy.path=act_so101_block2box/checkpoints/last/pretrained_model