SO-ARM100 中位校准教程
1. 为什么要中位校准?
STS3215 舵机的输出轴在0~360度范围内旋转时,磁编码器对应的输出范围是0~4095,舵机的旋转被限制在“0 <--> 4095”范围内,不能自主从0向4095运动,也不能自主从4095向0运动。
舵机的中位是2047,可以自主从2047往0的方向运动,也可以自主从2047往4095的方向运动。
但如果舵机在2047位置时,已经接近极限位置,则可能从2047往某个方向运动角度大于180度时,则该区域不可达。
2. 准备工作
Windows系统
飞特官方的Feetech Debug软件,FD.exe,最新的版本是1.9.8.4。该软件运行在Windows系统上。
舵机通过串口控制板连接到Windows电脑的USB口上。串口控制板接通电源。
2.1 软件操作
- 打开FD.exe(或FT_SCServo_Debug_v1.9.8.4.exe), “通信设置”区,端口号选择“COM7”(根据实际情况选择),波特率设置为1000000,校验位“NONE”,超时默认设置为25。
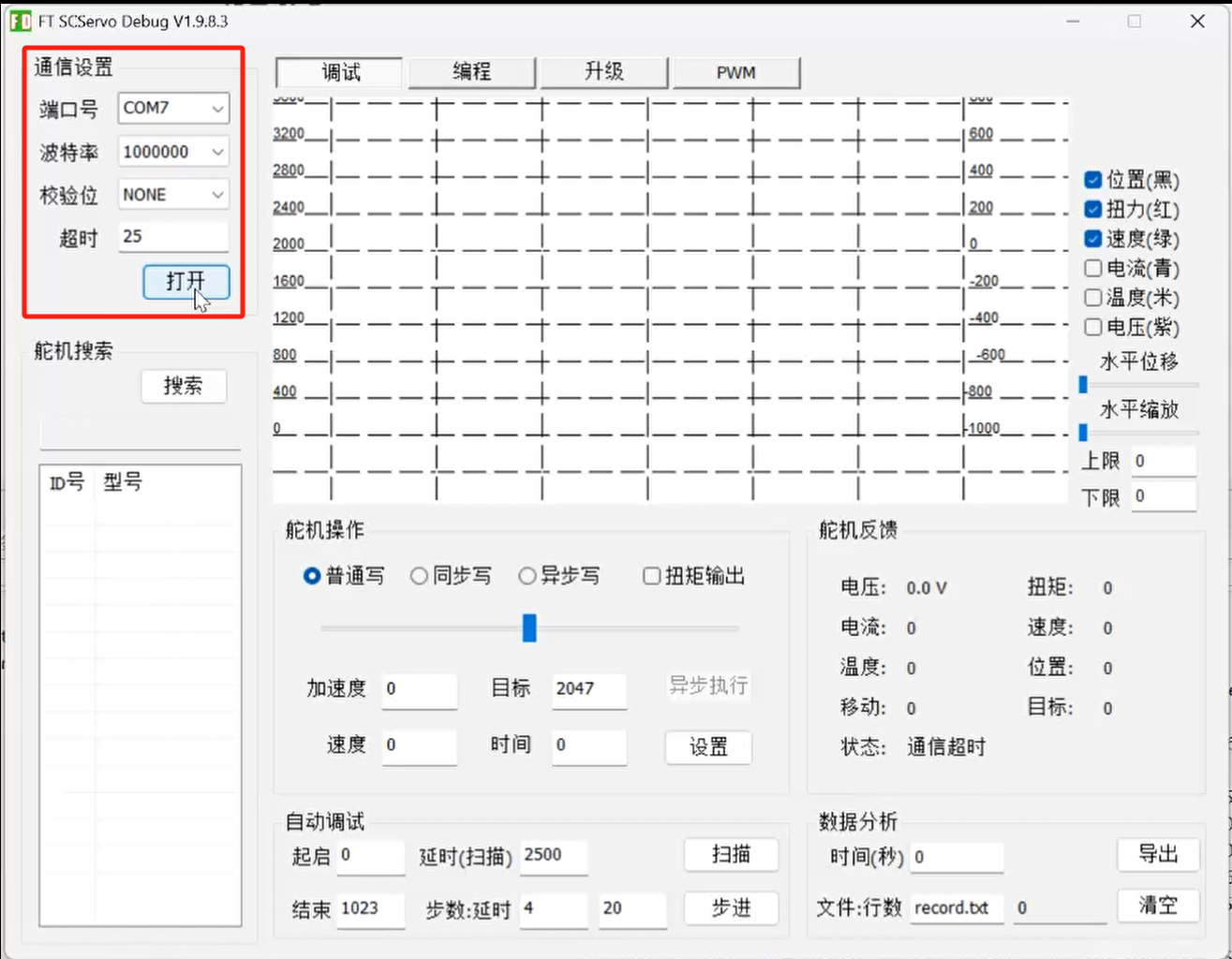
- 点击“打开”。
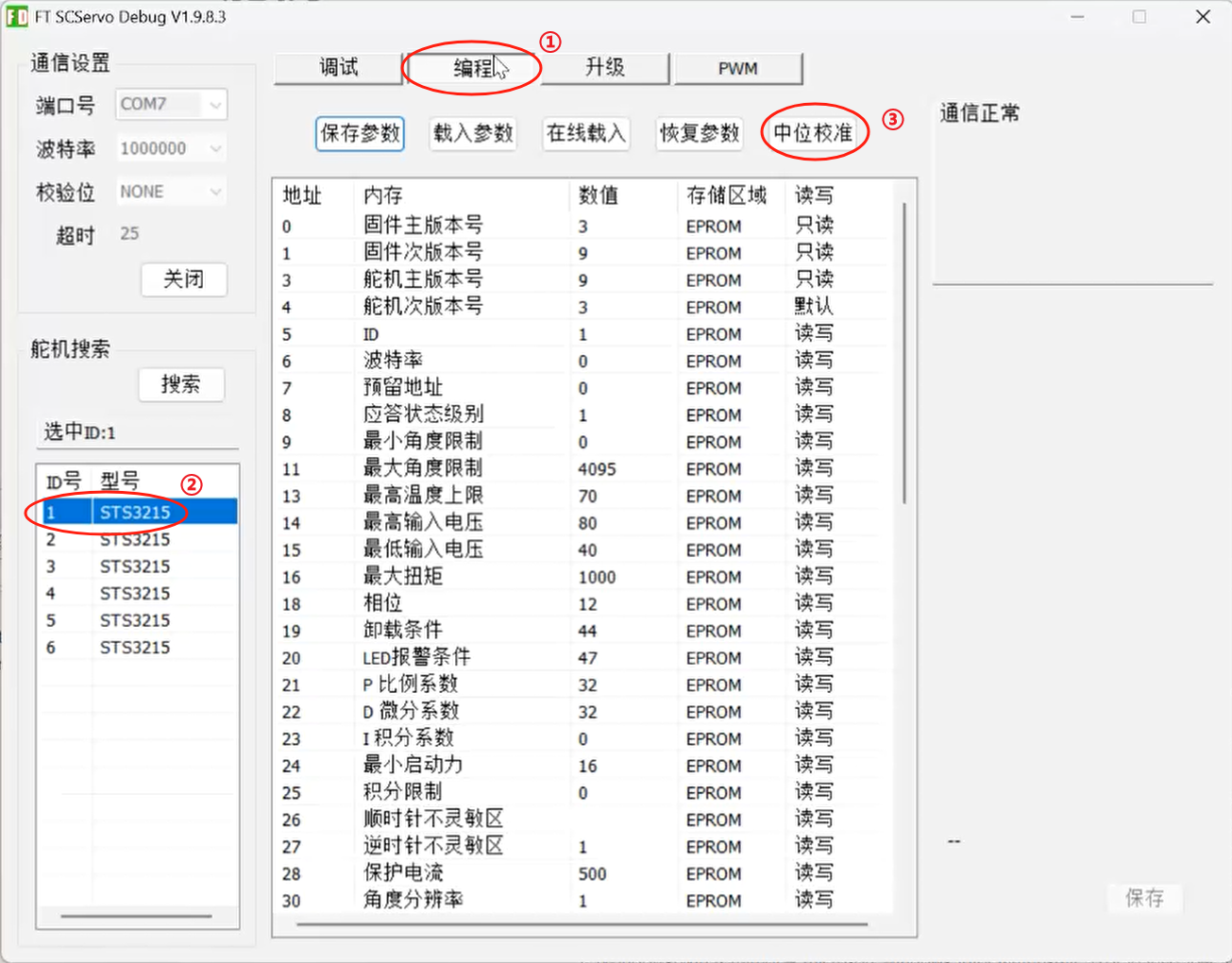
- 点击舵机搜索区域的“搜索”,当下面ID号1,2,3,4,5,6都找到时,则可以点击“停止”。
- 点击上方的“编程”选项卡,切换到编程模式。
- 左边逐个选中舵机,然后点击“中位校准”。
3. 校准步骤
以下,针对每一个舵机,校准的流程都是:
- 在左侧选中某个ID的舵机,激活对该舵机的编程。
- 将该ID的舵机旋转到可运动范围的中间位置。 在旋转的过程中,如果仅大范围调整这一个舵机的角度,可以通过“当前位置”显示值的变化来确认当前正在校准的舵机。
- 点击“中位校准”。
快捷方法,单臂摆成如下的方式,连上USB线之后,在“编程”模式下,逐个舵机点“中位校准”。
| 从臂 | 主臂 |
|---|---|
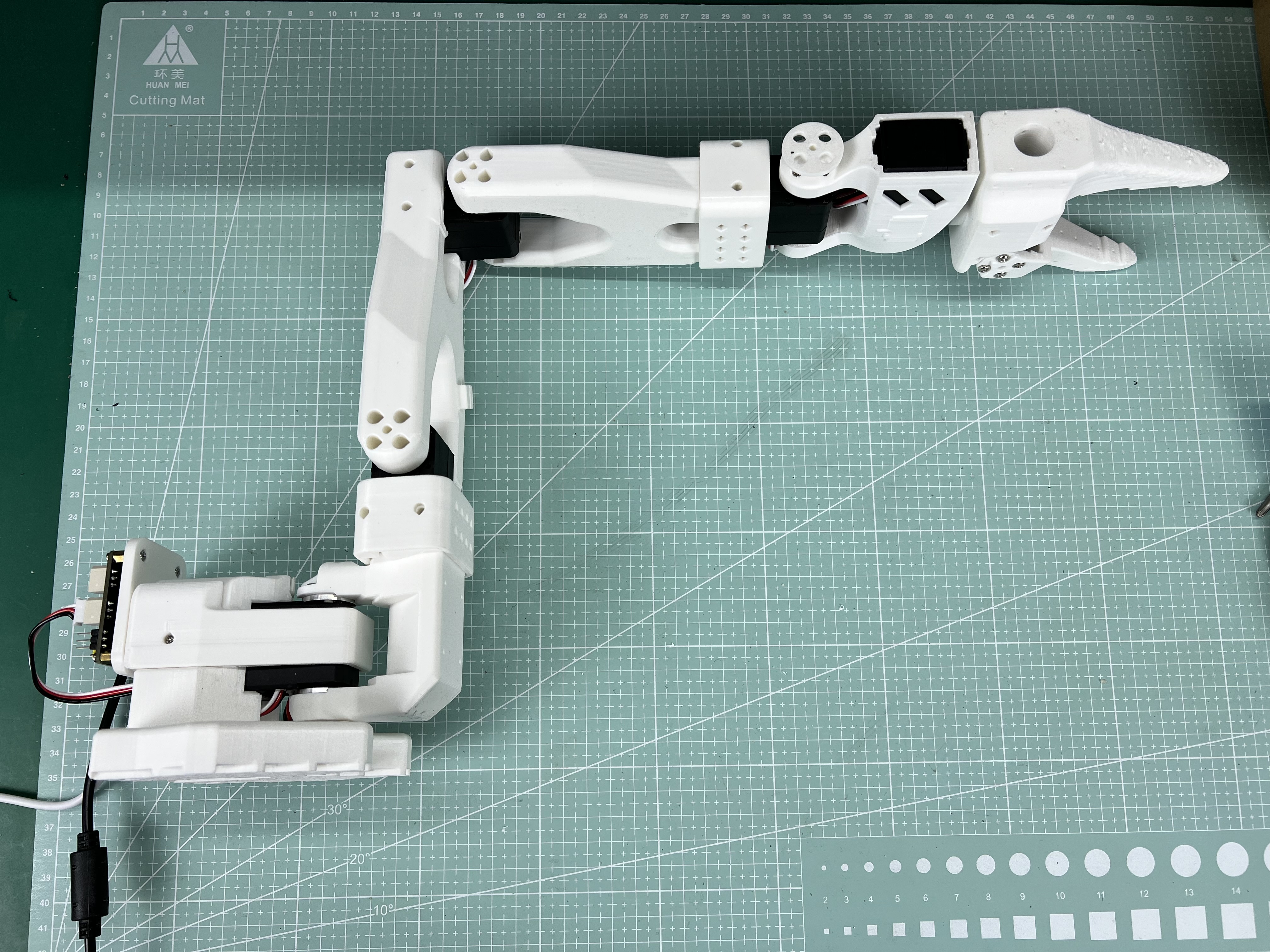 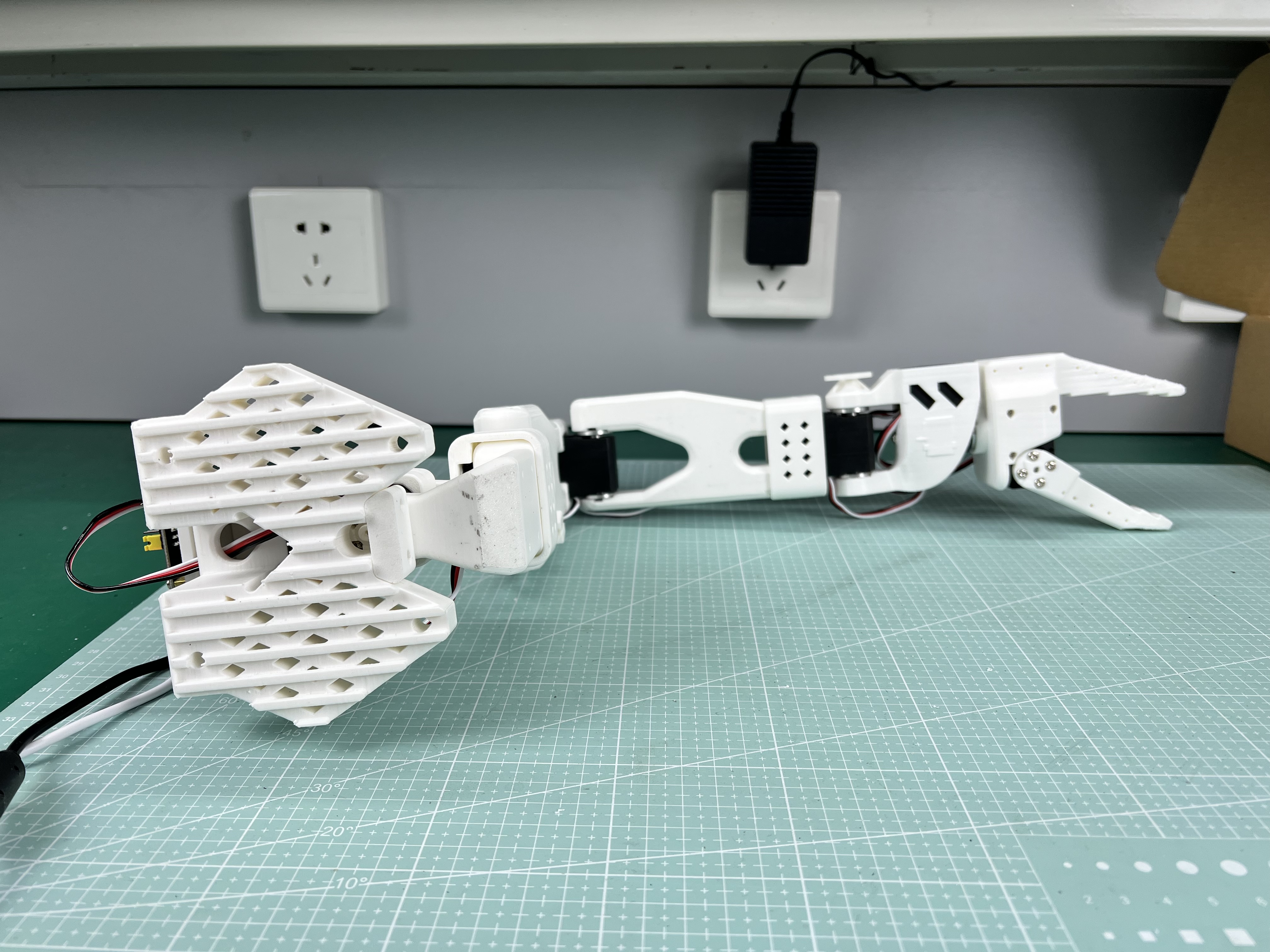 |
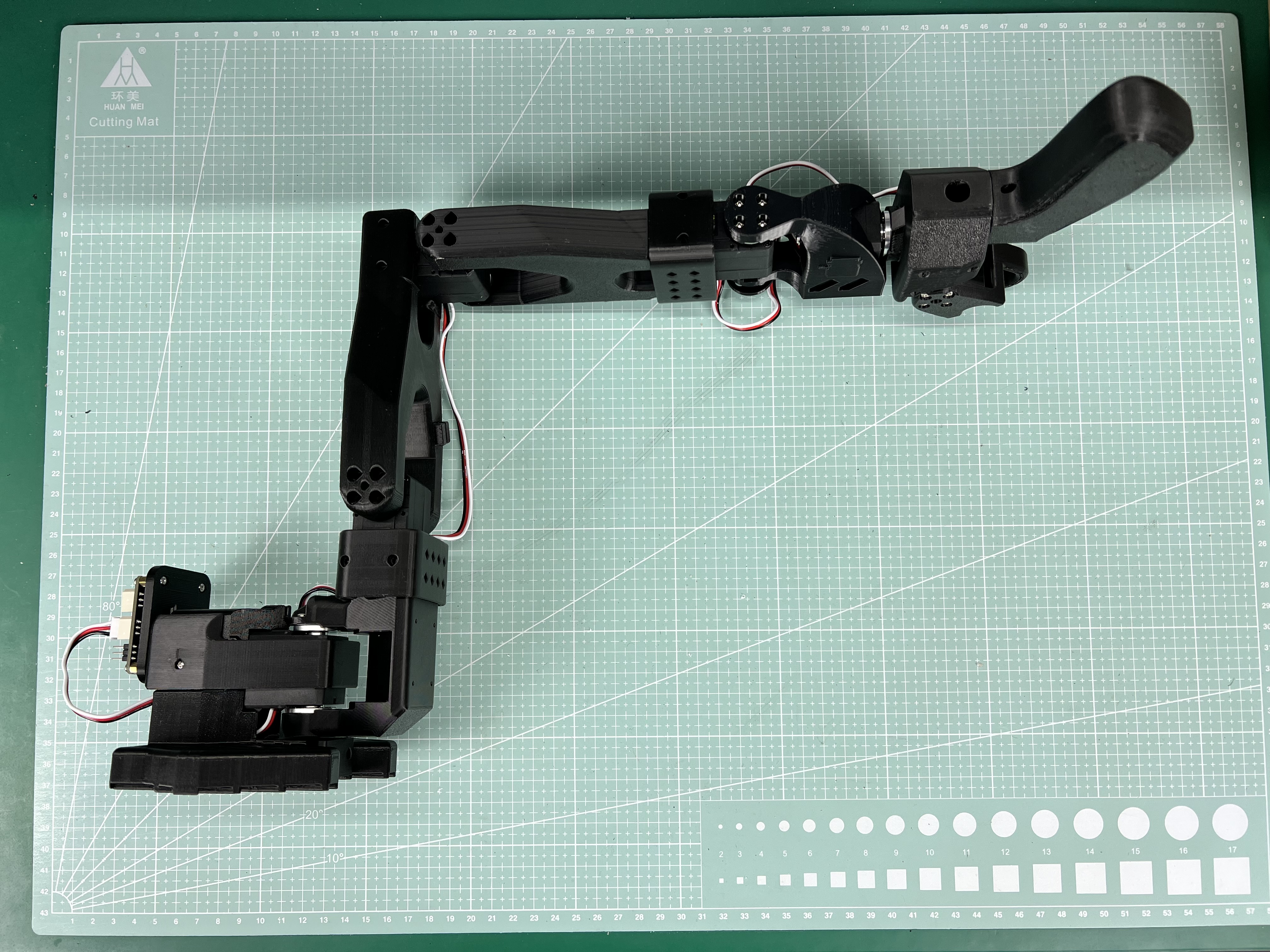  |
4. 各舵机的可运动范围的中位示意
4.1 ID=1号舵机
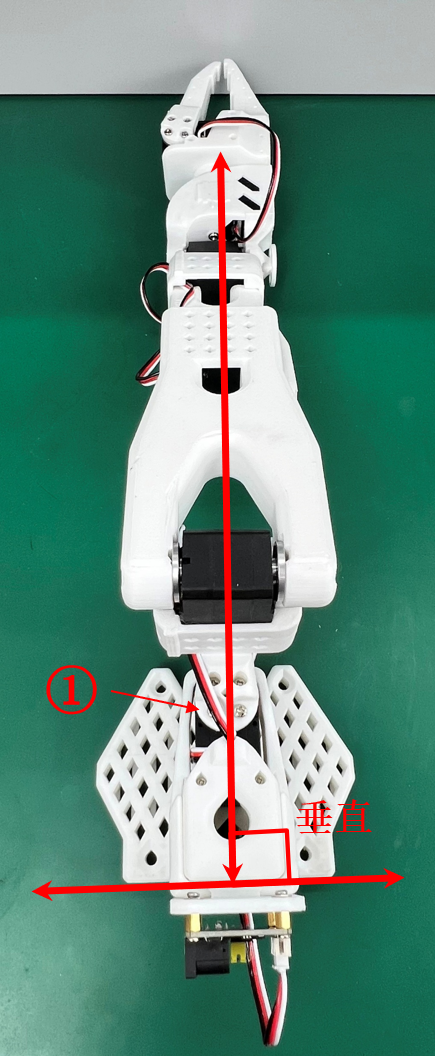
旋转1号舵机,使得整个臂延长的方向与底座底边垂直。
4.2 ID=2号舵机
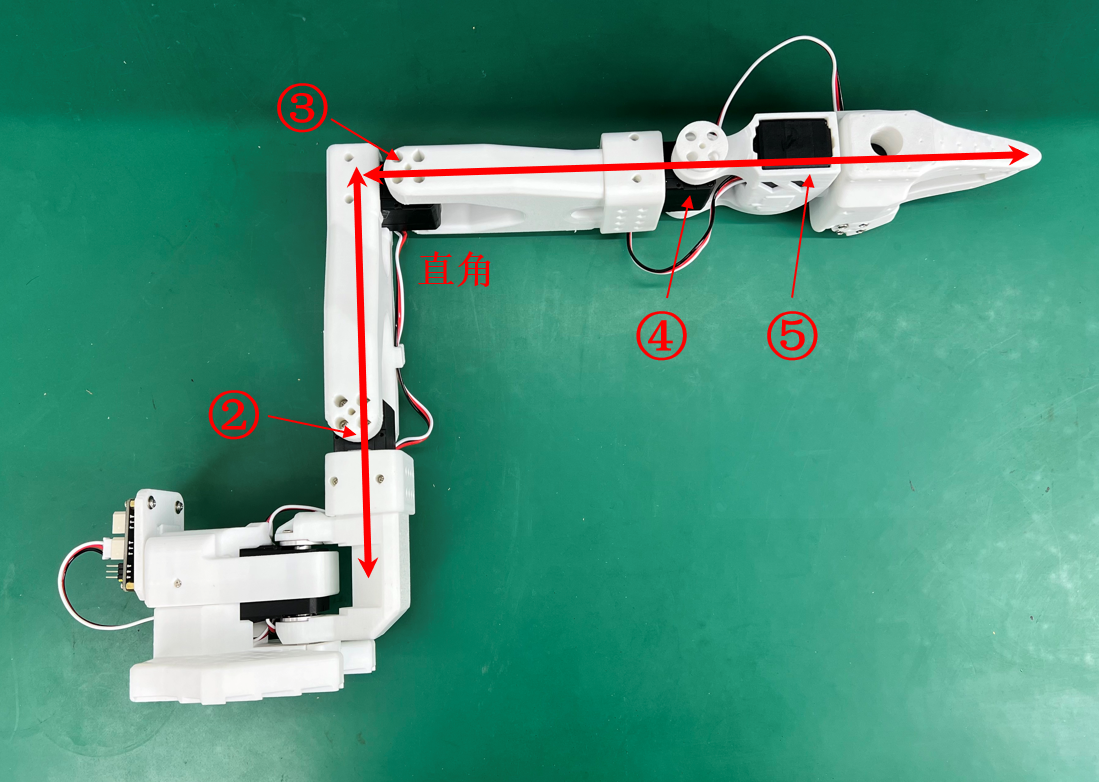
旋转2号舵机,使得Shoulder与Z轴连杆成一条线,与底座垂直。
4.3 ID=3号舵机
旋转3号舵机,使得Elbow与Shoulder垂直。
4.4 ID=4号舵机
旋转4号舵机,使得Wrist与Elbow成一条线。
4.5 ID=5号舵机
旋转5号舵机,使得手爪动爪运动平面,与底座面平行。 注意,这个位置,5号舵机到6号舵机的连线不要有缠绕,因为5号舵机以中位为基准,要保证逆时针、顺时针各有180度的旋转空间。
4.6 ID=6号舵机
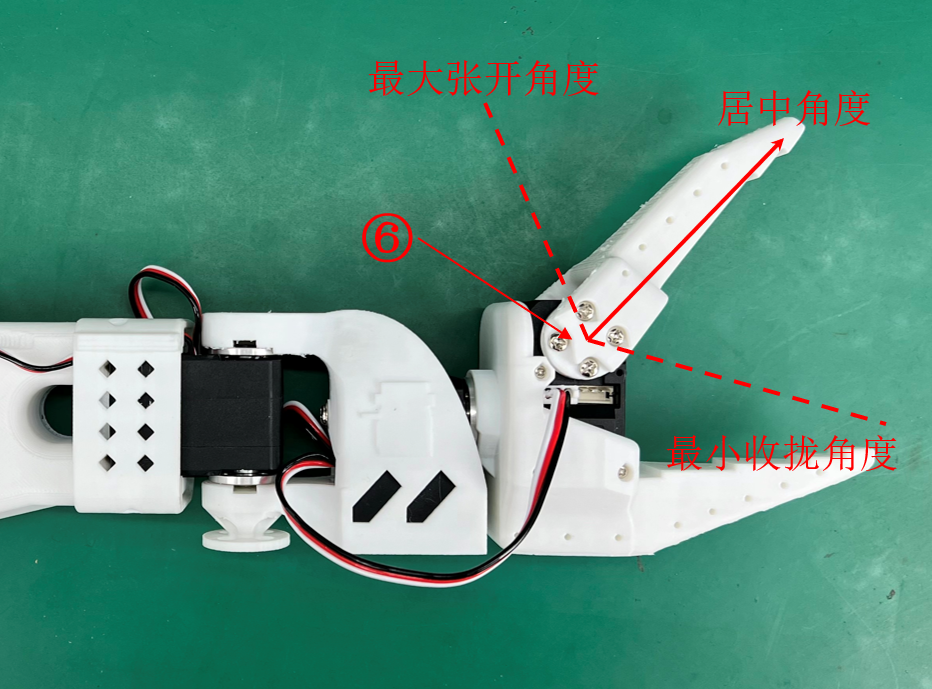
旋转6号舵机,使得动爪在可运动范围的中间角度。