📚 参考文档
排错指南、硬件参考、软件配置、高级教程和版本兼容文档
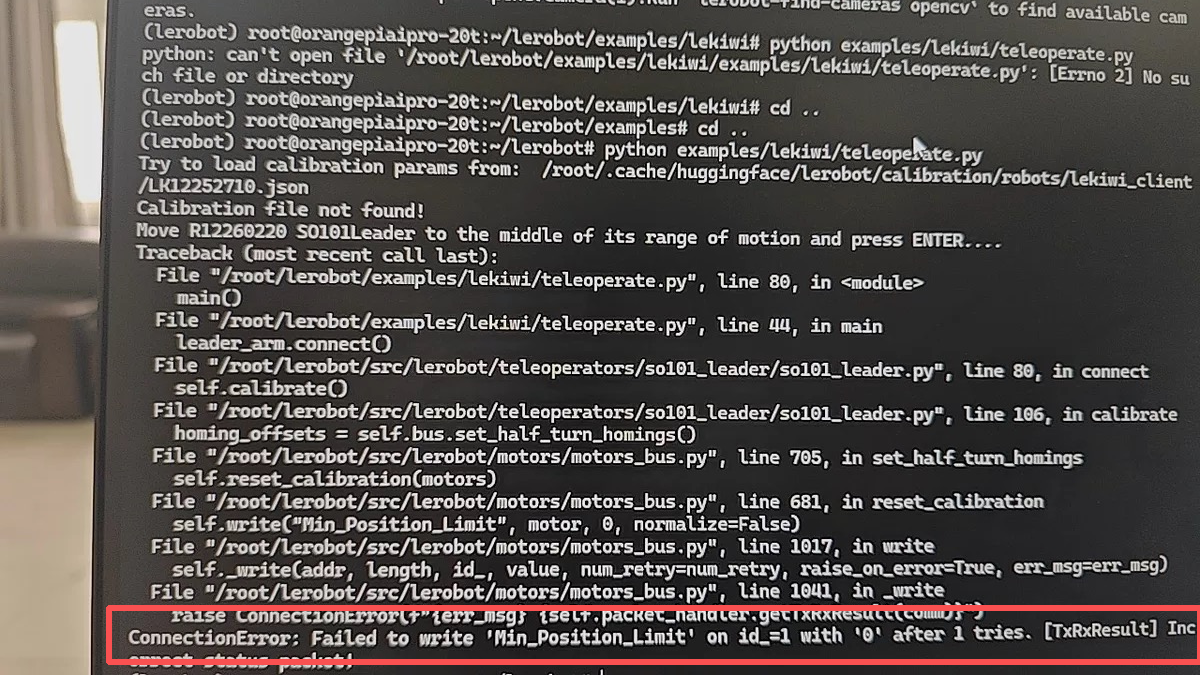
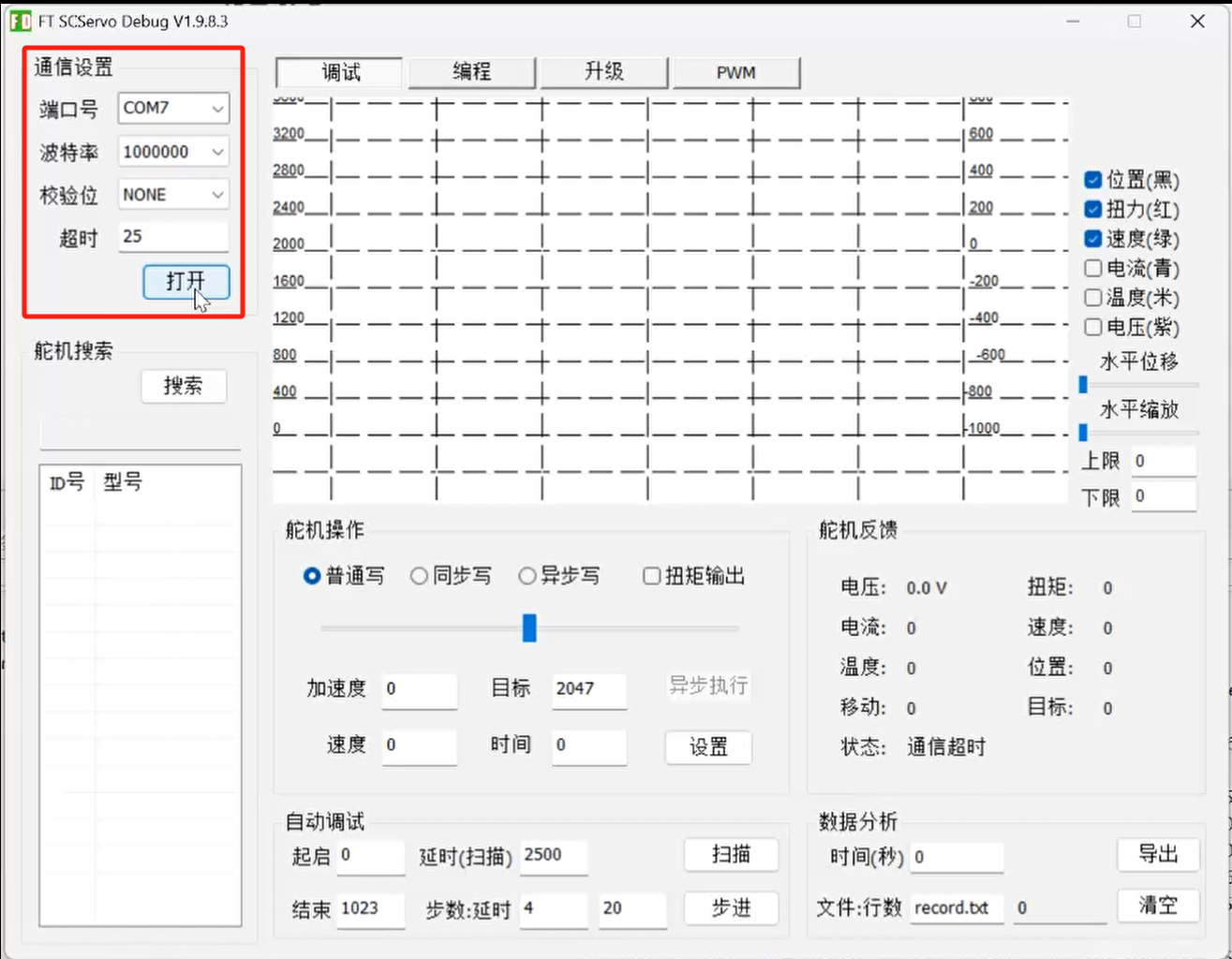
舵机报错解决方法
舵机通信超时、检测不到舵机等常见错误的系统排查流程,含 Feetech Debug 工具使用方法。

不小心编号破坏了怎么办?
误操作导致舵机 ID 冲突后的恢复方法,教你如何单独对底座舵机重新编号。

WSL USB 设备消失问题
WSL2 环境下 usbipd 导致 USB 设备从 Windows 设备管理器消失的解决方案。
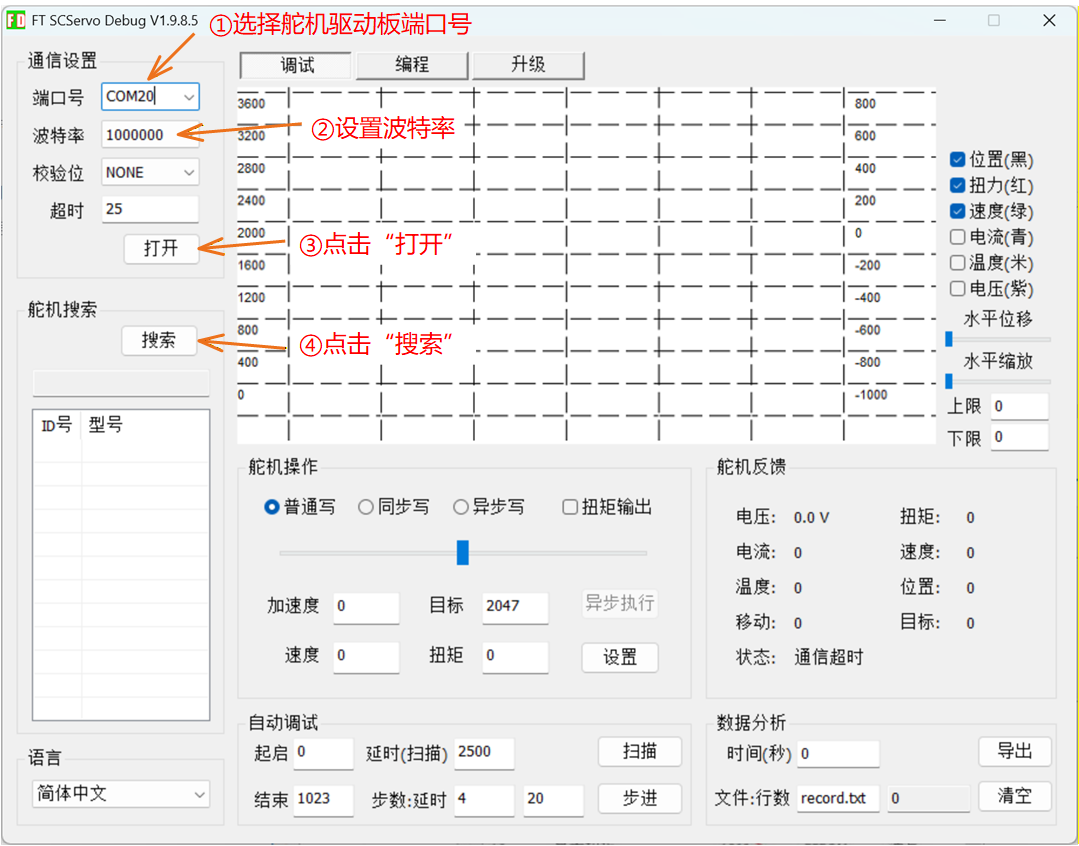
飞特舵机使用补充资料
Feetech Debug(FD.exe)软件的安装、基本使用、舵机 ID 修改和固件升级完整指南。
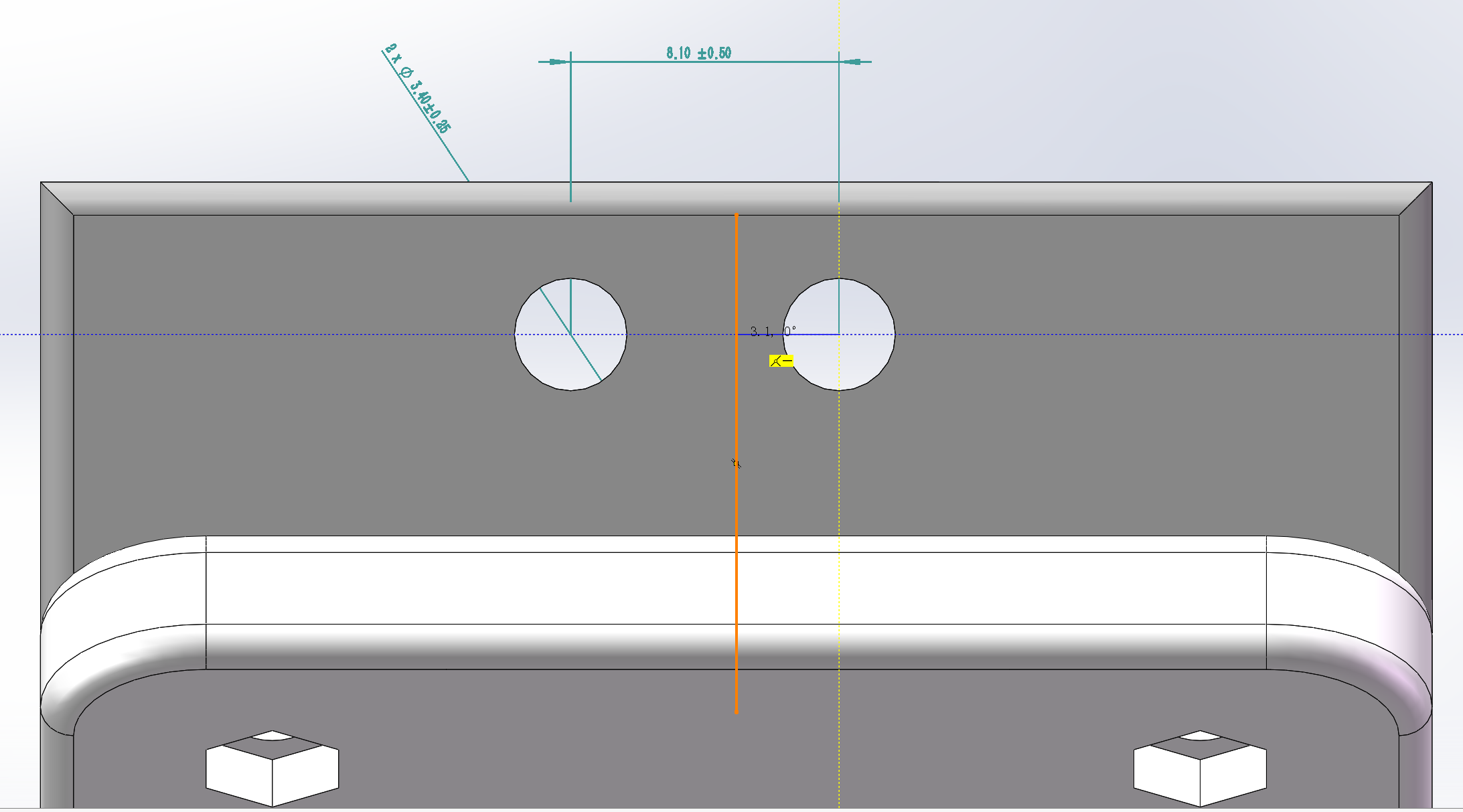
手眼相机规格尺寸
手眼相机模块的机械尺寸参数,含安装孔径、孔距、倾斜角度和安装板孔位位置。
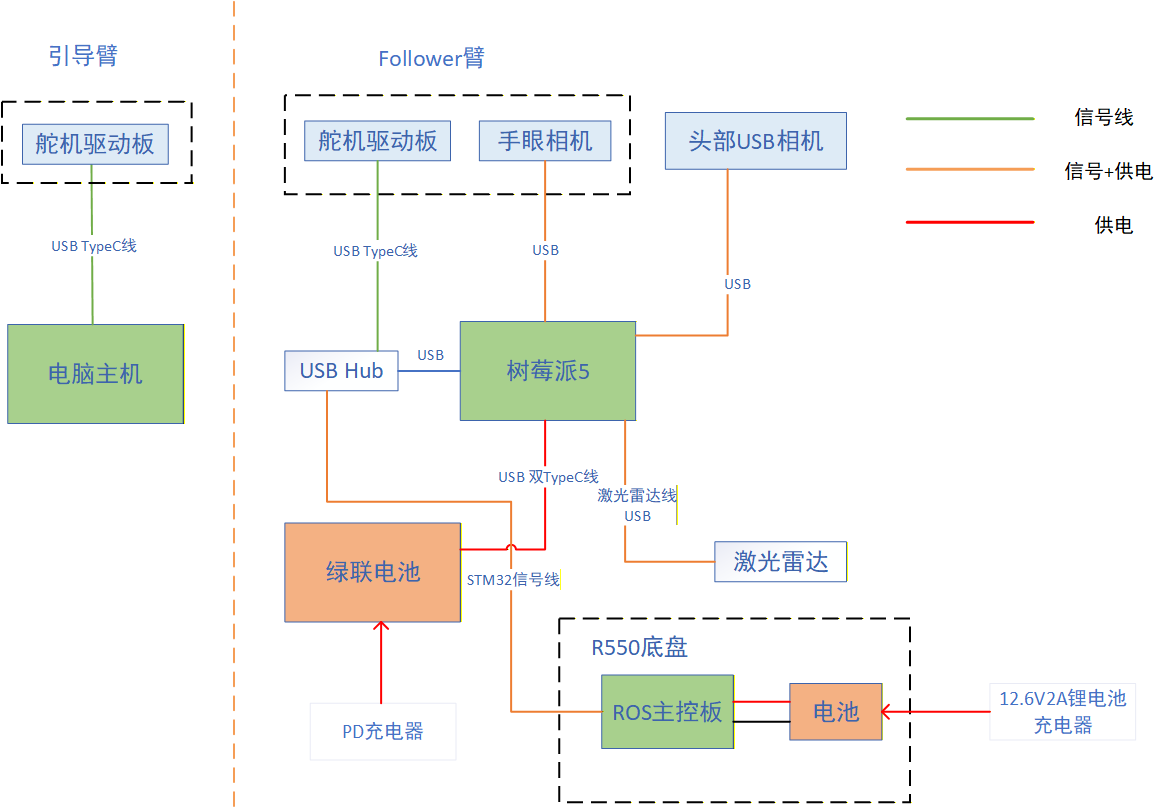
XLerobot R550 底盘补充说明
R550 底盘的组装、供电、ROS2 Docker 环境、设备文件布局和键盘遥操作完整说明。

机械臂与摄像头设备文件绑定
Linux 下通过 udev 规则将串口和 USB 摄像头绑定到固定符号链接,避免重启后端口号变化。

如何添加 JoyandAI 仓库
在已有 LeRobot 仓库上添加 JoyandAI fork 为远程仓库,切换分支并同步更新。

PyTorch 与 CUDA 版本兼容表
已测试的硬件平台(Orin Nano、Orin NX、RTX 4080/5090D)PyTorch 和 CUDA 兼容性对照。
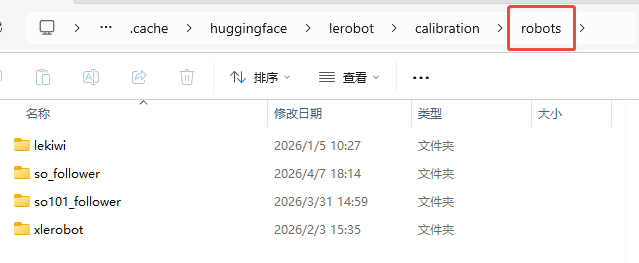
标定文件格式与互转
SO-ARM101、LeKiWi、XLeRobot 三种标定 JSON 文件的结构对比和互相提取方法。
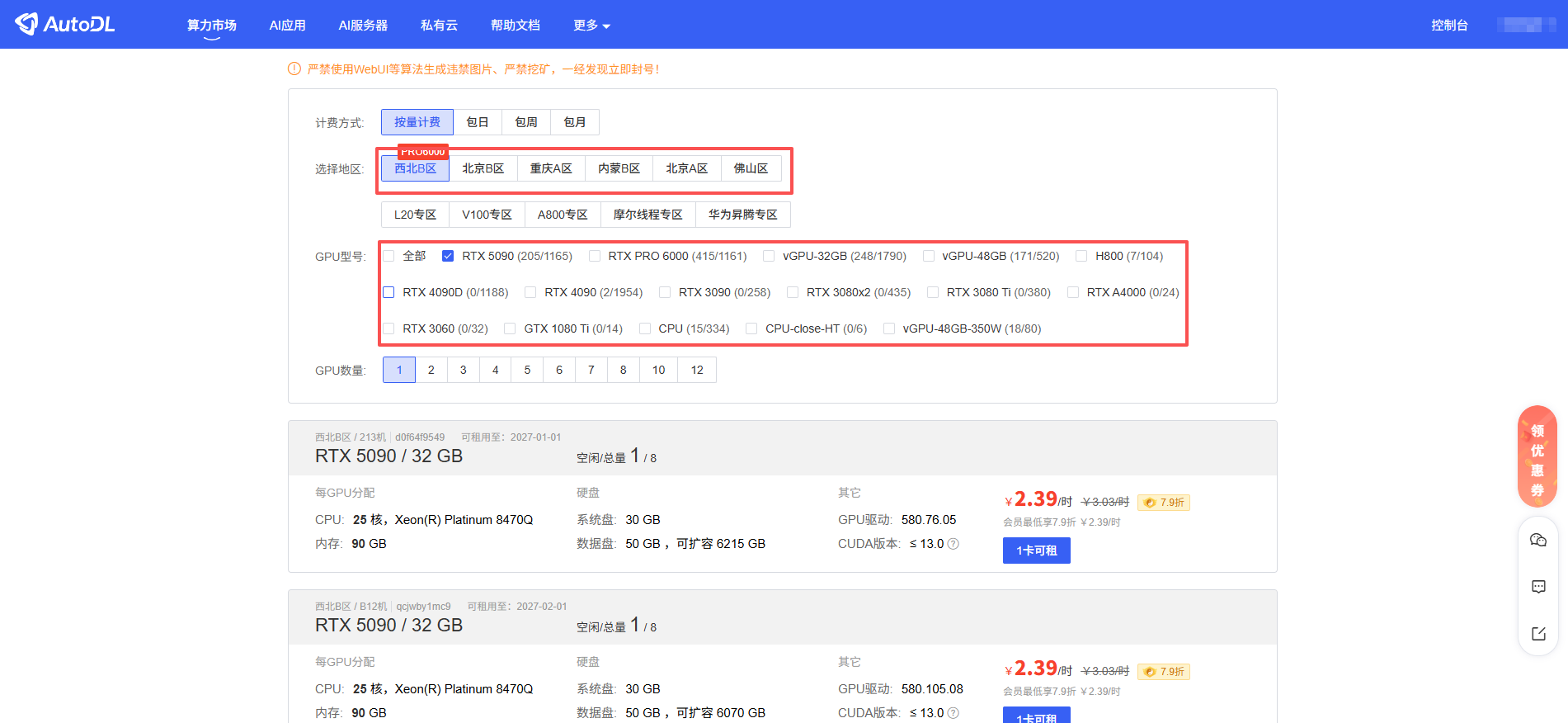
云服务器训练教程
在 AutoDL 等 GPU 云平台租用实例、配置 LeRobot 训练环境、上传数据和运行训练的完整流程。
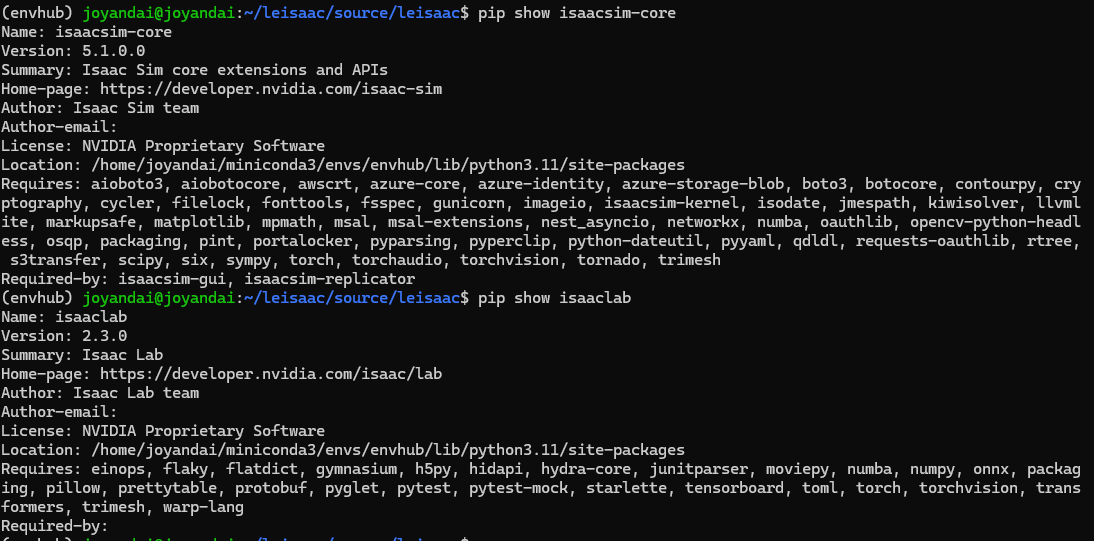
Isaac Sim 仿真到真机迁移
基于 NVIDIA Isaac Sim 的 sim-to-real 流程:ROS2 安装、遥操作数据采集、数据格式转换和训练部署。

Openclaw 语音任务调用
通过 Telegram 语音指令控制 XLeRobot,实现语音到任务的端到端调用和自动化执行。

OmniBase 全向底盘控制
OmniBase 底盘的使用指南:host 启动、键盘遥操作和底盘控制按键映射。
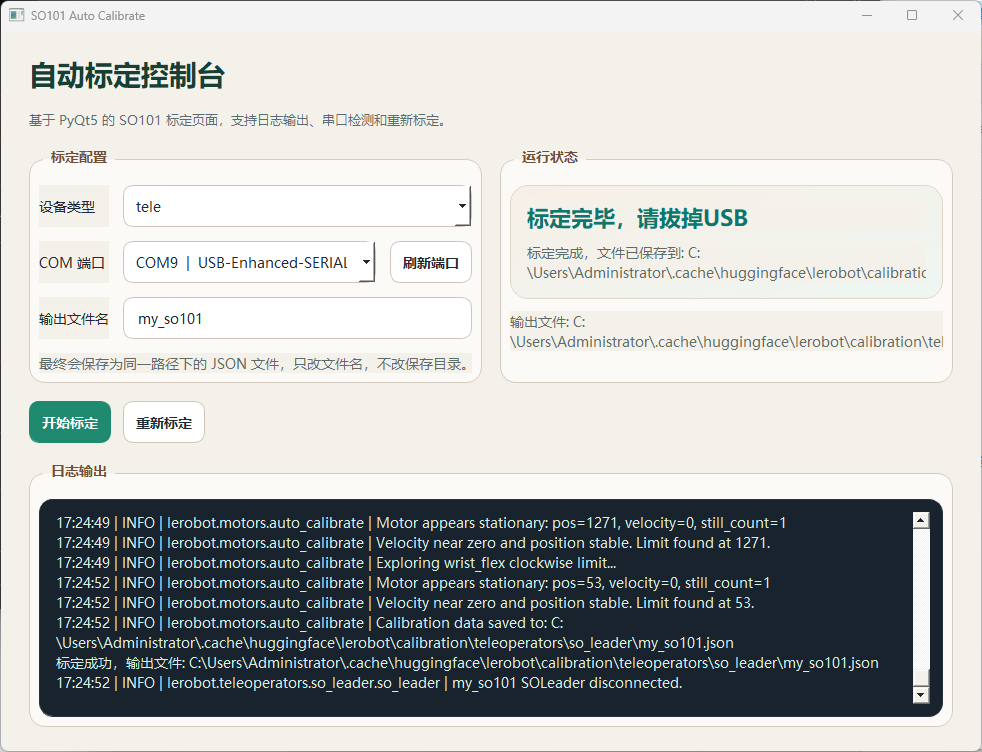
SO-ARM101 自动标定
SO-ARM101 自动标定程序(v0.4/v0.5)的 CLI 和 GUI 使用方法、参数定制和工作流程说明。
已有训练模型部署
将已训练好的模型部署到机器人上进行推理的流程说明(旧版本)。

SO-ARM100 机械臂安装 SOP
SO-ARM100 标准作业程序:舵机安装、结构组装和接线指引(旧版本)。

SO-ARM100 相机套件安装指引
SO-ARM100 相机套件的安装步骤和注意事项(旧版本)。
SO-ARM100 中位校准教程
SO-ARM100 机械臂中位校准的详细操作步骤(旧版本)。